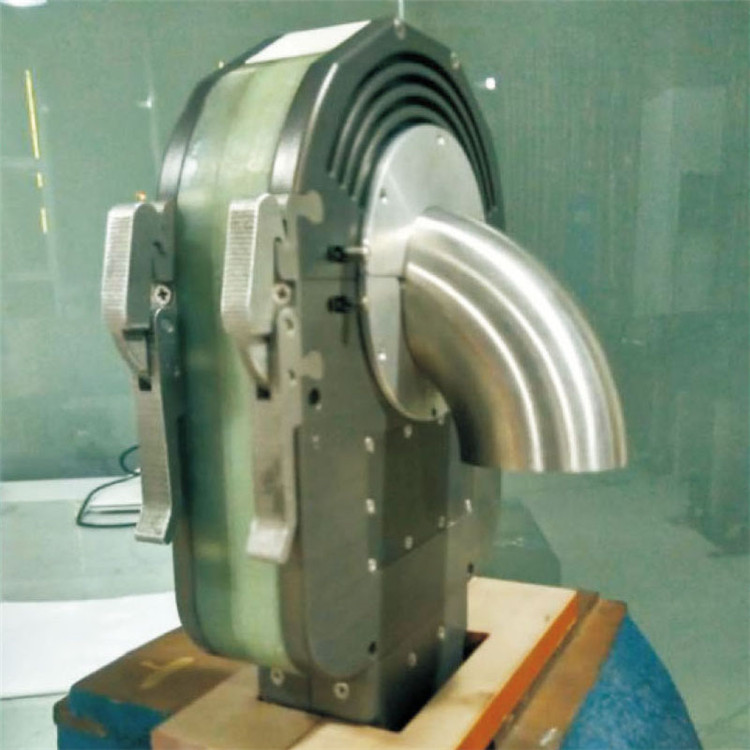
管道自动焊机胳膊运动学 管道自动焊机的机械手臂是由多个刚性杆体由转动或挪动的骨节串并联而成,是一个开环骨节链,开链的一端固接进底座上,另一端是随意的,安着尾端操作器 ( 如焊机 ) ,在管道自动焊机实际操作时,管道自动焊机胳膊前端开发的尾端操作器务必与被生产加工钢件处在相一致的部位和姿势,而这种部位和姿势是由数个臂骨节的健身运动所生成的。
管道自动焊接机分类:管道自动焊接机一般我们为分两大类:现场管道自动焊接机、预制管道自动焊接机
现场管道自动焊接机:顾名思义用于管道的焊接现场的管道自动焊接机,主要用于:长输管道、天然气管道、化工管道的现场焊接中。
1、磁吸式管道自动焊接焊机:
适用于长输管道或安装现场的固定焊缝填充盖面焊接;碳钢管道焊接时无需轨道,磁轮吸附在管子上自动爬行;小车旋转速度无级调速;焊枪可沿管子轴向进行线性摆动;焊枪可沿管子轴向进行角度调节;焊枪可垂直于管子轴向进行角度调节;焊枪可沿管子径向进行上下距离调节;标配HiArc M500A焊接电源;实芯焊丝 混合气体向下焊焊接,药芯焊丝 混合气体向上焊焊接,主要的焊接手段为:二保焊。
2、轨道式管道自动焊接焊机:
适用于长输管道或安装现场的固定焊缝填充盖面焊接、对开式圆环轨道安装在管子外部、手动快速螺钉对中定位、焊接机头安装在轨道上、原装进口MIG焊接电源、适应发电机的电压波动、实芯焊丝混合气体、向下焊焊接方式,主要的焊接手段为:氩弧焊。

管道自动焊接机,主要是以机器来代替对人工的焊接。管道自动焊接焊机主要的焊接方法有:氩弧焊、二氧化碳保护焊又叫气保焊和二保焊、埋弧焊。
因而,管道自动焊机运动控制系统中,务必要了解机械手臂各骨节自变量室内空间和尾端操作器的部位和姿势相互关系,这就是说管道自动焊机运动学实体模型。 一台管道自动焊机机械手臂几何图形构造明确后,其运动学实体模型就能明确,它是管道自动焊机运动控制系统的基本。